-> Hier kostenlos registrieren
Hallo,
Ich möchte auf einem Förderband ein Brot auf eine Sollposition Positionieren.
Eckdaten:
SPS: 1515F
Programmierung im TIA V18
Der Inkremental Encoder ist am Motor
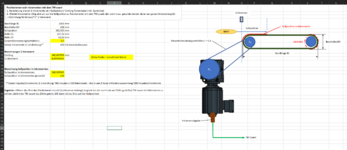
Die Position soll mit dem TM count erfasst werden hierzu wurde als Signalart Impuls A und als Messwert Periodendauer gewählt (siehe Bilder)
Zum Einsatz Kommt der Baustein bzw. das Technologie objekt von Siemens "High_Speed_counter". Die ausgabe schnittstelle "CountValue" liefert hierbei den aktuellen Zählwert.
Ich habe folgende frage ob die berechnung stimmt bzw. die Vorgehensweise (siehe Bild Excel berechnung).
1. Ich errechne mir 1 Inkrement ergibt sich aus-->Der Sollposition/ Umfang Förderband
2. Wieviel Inkremente notwendig sind um auf die Sollposition zu Positionieren Sprich was der TM count zählen muss
das ergibt sich aus-->(((Umfang/4)+Sollpos)*i)* 1 Inkrement
Da der Inkremental Geber am Motor sitz und das Rad am Motor doppelt so groß ist als das am Förderband was Über den Riemen angetrieben wird ist
ja 1 Umdrehung am motor der doppelte weg am Förderband.
Vielen Dank für jede Unterstützung!
Gruß
Frozen
Ich möchte auf einem Förderband ein Brot auf eine Sollposition Positionieren.
Eckdaten:
SPS: 1515F
Programmierung im TIA V18
Der Inkremental Encoder ist am Motor
Die Position soll mit dem TM count erfasst werden hierzu wurde als Signalart Impuls A und als Messwert Periodendauer gewählt (siehe Bilder)
Zum Einsatz Kommt der Baustein bzw. das Technologie objekt von Siemens "High_Speed_counter". Die ausgabe schnittstelle "CountValue" liefert hierbei den aktuellen Zählwert.
Ich habe folgende frage ob die berechnung stimmt bzw. die Vorgehensweise (siehe Bild Excel berechnung).
1. Ich errechne mir 1 Inkrement ergibt sich aus-->Der Sollposition/ Umfang Förderband
2. Wieviel Inkremente notwendig sind um auf die Sollposition zu Positionieren Sprich was der TM count zählen muss
das ergibt sich aus-->(((Umfang/4)+Sollpos)*i)* 1 Inkrement
Da der Inkremental Geber am Motor sitz und das Rad am Motor doppelt so groß ist als das am Förderband was Über den Riemen angetrieben wird ist
ja 1 Umdrehung am motor der doppelte weg am Förderband.
Vielen Dank für jede Unterstützung!
Gruß
Frozen