-> Hier kostenlos registrieren
Hallo zusammen,
ich bin aktuell dabei ein System mit zwei PID Reglern auszulegen. Es wird dafür der Baustein LCRPID von B&R verwendet, der ist eigentlich sehr solide.
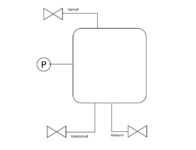
Das System besteht aus einem Drucktank, der abwechselnd mit Dampf und mit Vakuum ausgesetzt wird. Die Vorgaben setzten eine sehr hohe Genauigkeit einer Druckänderungsgeschwindigkeit voraus. Es sollen sehr oft positive und negative gerade und fixe Druckänderungsgeschwindigkeiten nachgefahren werden.
Es gibt jeweils ein Proportionalventil für Dampf und Vakuum und nen Drucksensor. Der Regler läuft im 10ms Takt, die Ausgabe ebenfalls. Der Aufruf vom Baustein sowie die Rate der Ausgabe können jedoch eingestellt werden. Aktuell addiere ich den neuen Sollwert jede 100 ms neu und schlage den auf den Sollwert des Regler auf. So entsteht quasi diese Rampe
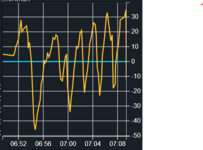
Mein Problem ist noch, dass der Regler wirklich sehr schlecht arbeitet, wenn man sich einmal den Fehler über der Zeit anschaut. Durch die Rampe eskaliert irgendwann der I-Anteil und wird immer größer und größer erreicht recht schnell 100. Die ist bei sehr kleinen Werten sehr brutal.
Der Regler hat folgende Neigung: Am Anfang überschießt er und flacht dann langsam ab. Ab einem gewissen Fehler regelt er fast ausschließlich entweder 0 oder 100%, dadurch schaukelt er sich nach Betriebspunkt sehr stark hoch. Problem ist auch die Strömungsmechanik dahinter: Wenn ein Ventil für etwas länger 100% offen ist, dann baut sich die Strömung erst richtig auf und dann reagiert das System deutlich schneller als vom Regler erwartet.
Ich habe in der Thematik seit ein paar Tagen keine Fortschritte mehr gemacht, habe mit einem P-Regler angefangen, aber so richtig richtig will es einfach nicht werden.
Habt ihr etwas Input für mich? Danke im Vorraus.
ich bin aktuell dabei ein System mit zwei PID Reglern auszulegen. Es wird dafür der Baustein LCRPID von B&R verwendet, der ist eigentlich sehr solide.
Das System besteht aus einem Drucktank, der abwechselnd mit Dampf und mit Vakuum ausgesetzt wird. Die Vorgaben setzten eine sehr hohe Genauigkeit einer Druckänderungsgeschwindigkeit voraus. Es sollen sehr oft positive und negative gerade und fixe Druckänderungsgeschwindigkeiten nachgefahren werden.
Es gibt jeweils ein Proportionalventil für Dampf und Vakuum und nen Drucksensor. Der Regler läuft im 10ms Takt, die Ausgabe ebenfalls. Der Aufruf vom Baustein sowie die Rate der Ausgabe können jedoch eingestellt werden. Aktuell addiere ich den neuen Sollwert jede 100 ms neu und schlage den auf den Sollwert des Regler auf. So entsteht quasi diese Rampe
Mein Problem ist noch, dass der Regler wirklich sehr schlecht arbeitet, wenn man sich einmal den Fehler über der Zeit anschaut. Durch die Rampe eskaliert irgendwann der I-Anteil und wird immer größer und größer erreicht recht schnell 100. Die ist bei sehr kleinen Werten sehr brutal.
Der Regler hat folgende Neigung: Am Anfang überschießt er und flacht dann langsam ab. Ab einem gewissen Fehler regelt er fast ausschließlich entweder 0 oder 100%, dadurch schaukelt er sich nach Betriebspunkt sehr stark hoch. Problem ist auch die Strömungsmechanik dahinter: Wenn ein Ventil für etwas länger 100% offen ist, dann baut sich die Strömung erst richtig auf und dann reagiert das System deutlich schneller als vom Regler erwartet.
Ich habe in der Thematik seit ein paar Tagen keine Fortschritte mehr gemacht, habe mit einem P-Regler angefangen, aber so richtig richtig will es einfach nicht werden.
Habt ihr etwas Input für mich? Danke im Vorraus.